Автомобильная камера: глаз автономного вождения
Установленные в автомобиле камеры известны как «глаза автономного вождения» и являются основным сенсорным оборудованием в системе ADAS и в области автомобильного автономного вождения.Основная функция сбора информации об изображении осуществляется с помощью объектива и датчиков изображения, которые могут обеспечить визуальное восприятие на 360° и компенсировать недостатки радара в распознавании объектов.Это датчик, наиболее близкий к человеческому зрению.
Автомобильные камеры широко используются в автомобильной отрасли, постепенно расширяясь от раннего использования для записи вождения, обратного изображения и кругового обзора при парковке до интеллектуального распознавания поведения в кабине и вождения с помощью ADAS, со все более разнообразными сценариями применения.
Текущий показатель CR3 мировой индустрии автомобильных камер составляет 41%, при этом десять крупнейших компаний занимают 96% доли рынка.Концентрация мировой индустрии автомобильных камер находится на высоком уровне.
Институт данных о потерях на дорогах (HLDI) прогнозирует, что к 2030 году почти 50% автомобилей будут оснащены технологией ADAS.
По данным ICVTank, ожидается, что к 2025 году масштабы производства автомобильных камер в Китае достигнут 23 миллиардов человек, а среднегодовой темп роста составит 30% в течение следующих пяти лет;Ожидается, что мировой рынок автомобильных камер вырастет с $11,2 млрд в 2019 году до $27 млрд в 2025 году, при этом среднегодовой темп роста за 5 лет составит 15,8%.
Автоматическое вождение включает в себя восприятие, суждение и исполнение, а восприятие является источником всего процесса и важным модулем системы автоматического вождения.В процессе вождения транспортного средства система восприятия будет собирать информацию об окружающей среде в режиме реального времени с помощью датчиков, что эквивалентно «глазам» автономного транспортного средства, и может помочь транспортному средству достичь аналогичной способности наблюдения. человека-водителя.
В автономных транспортных средствах система восприятия в основном состоит из датчиков, таких как камеры, радары миллиметрового диапазона и LiDAR (необязательно, в основном из-за боязни отвлечься).В качестве основного датчика восприятия окружающей среды камера играет очень важную роль в достижении комплексного визуального восприятия на 360°, компенсируя недостатки радара в распознавании объектов, и является наиболее близким к человеческому зрению датчиком.Поэтому автомобильные камеры являются одним из ключевых устройств в области автономного вождения.
Что такое автомобильная камера?
Основная аппаратная структура автомобильных камер включает оптические линзы (в том числе оптические линзы, фильтры, защитные пленки и т. д.), датчики изображения, процессоры сигналов изображения (ISP), сериализаторы, разъемы и другие компоненты.Принципиальная схема его строения представлена на рисунке:
Анатомия автомобильного модуля камеры
На изображении выше показано анатомическое строение модулей камеры, обычно используемых в автомобилях.Помимо внешнего алюминиевого корпуса, уплотнительного кольца и линзы, на самом деле существует относительно простая конструкция из нескольких слоев посередине, обычно включающая сенсорную плату сенсора, небольшую плату процессора изображений и плату сериализатор.Зачем нужен сериализатор, так это потому, что обычно шина вывода данных изображения датчиков камер или интернет-провайдеров является стандартной, характеризуется высокой скоростью прохождения, но расстояние по шине передачи небольшое, в противном случае целостность сигнала не может быть гарантирована.
Поэтому на автомобиле нам необходимо преобразовать его в стандарты высокоскоростной шины, такие как GMSL, которые подходят для передачи на большие расстояния на автомобиле, поэтому модуль камеры обычно преобразуется в шину через последовательную плату.Кроме того, коаксиальные кабели можно использовать для подачи питания на модули и передачи данных изображения.
Оптическая линза: отвечает за фокусировку света и проецирование объектов в поле зрения на поверхность носителя изображения.В зависимости от требований к эффекту изображения может потребоваться несколько слоев оптических линз.Фильтры могут отфильтровывать световые полосы, которые не видны человеческому глазу, оставляя в поле зрения человеческого глаза только видимые световые полосы реального пейзажа.
Датчик изображения: Датчики изображения могут использовать функцию фотоэлектрического преобразования фотоэлектрических устройств для преобразования светового изображения на светочувствительной поверхности в электрический сигнал, пропорциональный световому изображению.В основном он делится на два типа: CCD и CMOS.
Процессор сигналов изображения ISP: в основном использует аппаратную структуру для предварительной обработки данных формата RAW изображения и источника видео, вводимых датчиком изображения, которые могут быть преобразованы в YCbCr и другие форматы.Он также может выполнять различные задачи, такие как масштабирование изображения, автоматическая экспозиция, автоматический баланс белого и автоматическая фокусировка.
Сериализатор: он передает обработанные данные изображения и может использоваться для передачи различных типов данных изображения, таких как RGB и YUV.
Разъем: используется для подключения фиксированной камеры.
Автомобильные камеры также предъявляют более высокие требования к производственным процессам и надежности, чем промышленные и коммерческие камеры.В связи с тем, что автомобилям приходится работать в суровых условиях в течение длительного времени, автомобильные камеры должны стабильно работать в сложных рабочих условиях, таких как высокие и низкие температуры, сильные вибрации, высокая влажность и жара.Основные требования к процессному производству следующие:
Требования к процессу для автомобильных камер
Устойчивость к высоким температурам: камера, установленная на автомобиле, должна нормально работать в диапазоне от -40 ℃ до 85 ℃ и адаптироваться к резким изменениям температуры;
Сейсмостойкость: транспортные средства могут создавать сильную вибрацию при движении по неровным дорогам, поэтому бортовая камера должна выдерживать вибрацию различной интенсивности;
Антимагнитный: когда автомобиль заводится, он генерирует чрезвычайно сильные электромагнитные импульсы, требующие чрезвычайно высокой антимагнитной защиты.производительность;
Водонепроницаемость: камера должна быть плотно закрыта, чтобы обеспечить ее нормальное использование даже после нескольких дней пребывания под дождевой водой;
Срок службы: Срок службы должен составлять не менее 8-10 лет, чтобы соответствовать требованиям;
Сверхширокий угол: камера объемного обзора бокового обзора должна быть сверхширокоугольной с углом обзора по горизонтали 135 °;
Высокая динамика: транспортное средство движется с высокой скоростью, а окружающая среда освещения, с которой сталкивается камера, резко и часто меняется, что требует от CMOS камеры высоких динамических характеристик;
Низкий уровень шума: он может эффективно подавлять шум в условиях низкой освещенности, особенно когда требуется, чтобы камеры бокового и заднего вида четко захватывали изображения даже ночью.
Ключевые параметры интеллектуальной головки передней камеры автомобиля
Расстояние обнаружения
Угол горизонтального поля зрения
Угол вертикального поля зрения
Разрешение — когда камера фиксирует равномерно расположенные черно-белые полосы, максимальное количество линий, которые можно увидеть на мониторе (выше разрешения камеры).Когда количество строк превышает это значение, на экране видна только серая область, а черные и белые полосы уже не различимы.
Минимальная освещенность — относится к чувствительности датчика изображения к окружающему свету или самому темному свету, необходимому для нормального формирования изображения датчиком изображения.Это значение освещенности сцены, когда уровень видеосигнала камеры ниже половины максимальной амплитуды стандартного сигнала, когда освещенность объекта постепенно снижается.
Отношение сигнал/шум – отношение напряжения выходного сигнала к одновременно выходному напряжению шума;
Динамический диапазон — диапазон, в пределах которого значения яркости самых ярких и самых темных объектов в одном кадре, снятом камерой, могут нормально отображать детали.Чем больше динамический диапазон, тем в большей степени объекты, которые слишком яркие или слишком темные, могут нормально отображаться на одном и том же экране.
Каковы преимущества по сравнению с радиолокационной технологией?
1) По сравнению с радаром миллиметрового диапазона основными преимуществами современных камер являются:
Распознавание и классификация целей. В настоящее время обычный 3D-радар миллиметрового диапазона может только обнаруживать наличие препятствий впереди и не может точно определить размер и категорию препятствий;Например, различные типы распознавания полос, распознавания светофоров и дорожных знаков;
Обнаружение проходимого пространства, разграничение безопасных границ (проездных зон) движения транспортных средств, преимущественно разделяющих транспортные средства, обычные края обочин, края бордюров, видимые границы без препятствий и неизвестные границы;
Возможность обнаружения горизонтально движущихся целей, например обнаружение и отслеживание пешеходов и транспортных средств, пересекающих перекрестки;
Позиционирование и создание карты – то есть технологии.Хотя в настоящее время используется радар миллиметрового диапазона, эта технология более зрелая и имеет больше перспектив применения;
2) В системе автопривода лазерный радар аналогичен камере, но его преимущества:
Распознавание светофоров и распознавание дорожных знаков
Экономическое преимущество и высокая зрелость алгоритмов и технологий
Высокая скорость распознавания объектов
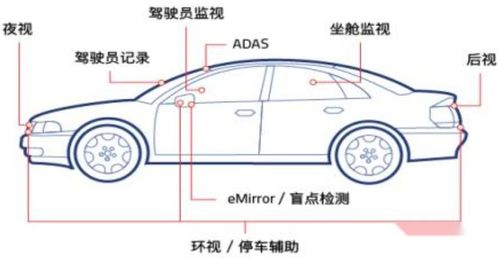
В настоящее время камеры, устанавливаемые на автомобиле, в основном делятся на пять категорий в зависимости от места их установки: камеры переднего обзора, камеры кругового обзора, камеры заднего вида, камеры бокового обзора и встроенные камеры.
Камера переднего вида: в основном устанавливается на лобовом стекле для обеспечения функций визуального восприятия и распознавания во время вождения.В зависимости от их функций ее можно разделить на основную камеру переднего вида, узкоугольную камеру переднего вида и широкоугольную камеру переднего вида.
Основная фронтальная камера: эта камера используется в качестве основной камеры в системе ADAS L2.Углы поля зрения обычно составляют 30°, 50°, 60°, 100° и 120°, а расстояние обнаружения обычно составляет 150-170 метров.Выходной формат камеры.
Широкоугольная камера переднего обзора. Основная функция этой камеры — распознавать объекты, находящиеся на близком расстоянии, в основном используется в городских дорожных условиях, вождении на низкой скорости и в других сценах.Угол поля зрения составляет 120–150 °, а расстояние обнаружения составляет около 50 метров.После масштабной установки объектива 8 МП на последующие автомобили эта камера отпала.
Узкоугольная камера переднего вида. Основная функция этой камеры — распознавать такие цели, как светофоры и пешеходы.Обычно используются узкоугольные линзы, можно выбрать линзы с углом обзора около 30–40°.А пиксели у этого объектива в целом такие же, как у фронтальной основной камеры.Камера имеет узкий угол обзора, имеет более высокую плотность пикселей и большее расстояние обнаружения и обычно может обнаруживать объекты на расстоянии до 250 метров или даже на больших расстояниях.
После установки 8-мегапиксельной камеры угол обзора фронтальной основной камеры может достигать 120°, что может больше не понадобиться.Расстояние обнаружения составляет около 60 метров.
Камера объемного звучания: в основном устанавливается вокруг кузова автомобиля, обычно с использованием 4-8 камер, которые можно разделить на камеру «рыбий глаз», обращенную вперед, камеру «рыбий глаз», обращенную слева, камеру «рыбий глаз», обращенную вправо, и камеру «рыбий глаз», обращенную назад.Используется для отображения функции панорамного обзора, а также визуального восприятия и обнаружения объектов с функцией парковки;Обычно используется цветовая матрица, поскольку существует необходимость восстановления цвета.
Камера заднего вида: обычно устанавливается на багажнике, в основном для помощи при парковке.Угол поля зрения составляет от 120 до 140 градусов, а расстояние обнаружения составляет около 50 метров.
Боковая камера переднего вида: установлена на средней стойке или зеркале заднего вида автомобиля, угол обзора этой камеры обычно составляет 90 °-100 °, а расстояние обнаружения составляет около 80 метров.Основная функция этой камеры — обнаружение боковых транспортных средств и велосипедов.
Камера бокового и заднего вида: обычно устанавливается на переднем крыле автомобиля, угол обзора этой камеры обычно составляет около 90 °, а расстояние обнаружения также составляет около 80 метров.В основном он используется для сценических приложений, таких как смена полосы движения транспортных средств и выезд на другие дороги.
Встроенная камера: в основном используется для мониторинга состояния водителя, напоминаний об усталости и других функций.
Среди них цена на камеры переднего вида относительно высока, а текущая рыночная цена составляет от 300 до 500 юаней;Цены на другие камеры составляют около 150-200 юаней.
На плане мы видим, что все 8 камер связаны с системой вождения, которая тесно связана с чисто автономным планом вождения, который продвигается без использования LiDAR.Самым большим преимуществом этого плана является его высокая экономическая эффективность.Благодаря использованию очень недорогой камеры собственной разработки был достигнут уровень автономного вождения.
Самым большим преимуществом этого решения, в котором используется несколько камер, является его высокая масштабируемость.На ранней стадии проектирования необходимо увеличить затраты на оборудование, но на более позднем этапе функция автономного вождения имеет очень хорошую совместимость и масштабируемость.
Благодаря этой модели датчика был достигнут высокий уровень функции автономного вождения с хорошим опытом, включая весьма характерную высокоскоростную автономную навигационную систему вождения (NGP) и функцию парковки с памятью для парковки.
S-Класс является представителем традиционных OEM-решений, а бинокулярная стереокамера является самым большим преимуществом Mercedes-Benz S-Класса.По сравнению с монокулярными камерами, бинокулярные камеры могут рассчитывать движение текущей обнаруженной цели в координатах X, Y и Z, определять положение и тип обнаруженной цели, а эффект от функции ADAS Mercedes Benz на уровне L2 равен тоже лучше, чем два других.
Анализируя решения для камер для серийных моделей автомобилей, мы обнаружили, что все они используют камеры со средним и низким разрешением для реализации функций автономного вождения.
Saitemei Security Electronics Co., Ltd. Сеть производителей автомобильных камер
Цепочка производства автомобильных камер в основном включает три основных звена: исходные материалы, промежуточные компоненты и последующие продукты.
Первоначальные материалы, такие как оптические линзы, фильтры и защитные пленки, используются для производства линз в сборе, а пластины используются для производства CMOS-чипов и процессоров сигналов DSP;Соберите промежуточный объектив, CMOS-чипы и клейкие материалы в модули и упакуйте их вместе с сигнальными процессорами DSP в камеры.
На этом уровне производственной цепочки поставщики верхнего уровня уже могут поставлять полные продукты для камер последующим транспортным средствам или клиентам-поставщикам первого уровня.В отрасли автомобильных камер камеры и алгоритмы программного обеспечения вместе составляют решение для автомобильных камер, которое применяется к автономным транспортным средствам.
В настоящее время все компании с большой долей рынка автомобильных камер являются ведущими мировыми поставщиками компонентов первого уровня, а последующие клиенты в основном охватывают крупные мировые автомобильные компании.
CMOS имеет самое высокое соотношение цены и качества среди автомобильных камер, достигая 52%;На упаковку модулей приходится 20%, а на оптические линзы — 19%.
КМОП-чип
CMOS (CIS-сенсор) — это основной светочувствительный компонент для автомобильных камер.По сравнению со светочувствительными компонентами CCD, CMOS имеет немного худшее качество изображения, но он дешевле и более энергоэффективен, что делает его широко предпочтительным в области автомобильных камер с низкими требованиями к пикселям.
Базовая структура датчиков изображения
Датчик изображения по внешнему виду разделен на светочувствительную область (Firecore), соединительные провода, внутреннюю схему и подложку.Светочувствительная область представляет собой однопиксельный массив, состоящий из нескольких отдельных пикселей.Когда световые сигналы, полученные от каждого пикселя, собираются вместе, они формируют полную картину.
Схема сечения CMOS-чипа
Из-за разных углов света, попадающего на каждый отдельный пиксель, на поверхность каждого отдельного пикселя добавляется микролинза, чтобы корректировать угол света, позволяя свету проникать на поверхность светочувствительного элемента вертикально.Это концепция чипа, который нужно держать в пределах небольшого отклонения от объектива.
Что касается архитектуры схемы, мы включаем датчик изображения в виде темного ящика, который преобразует световые сигналы в электрические сигналы.Внешние компоненты темного ящика обычно включают в себя схемы питания, данных, часов, связи, управления и синхронизации.Его можно просто понимать как Firecore, преобразующий световые сигналы в электрические сигналы, которые обрабатываются и кодируются логической схемой в темном ящике, а затем выводятся через интерфейс данных.
В связи с тем, что процесс проектирования пиксельного слоя в КМОП-чипах аналогичен аналоговым чипам, к производственным процессам предъявляются высокие требования.
Основные поставщики.
Производство и технология производства КМОП высоки, и с точки зрения мирового рынка в настоящее время они в основном заняты предприятиями, финансируемыми из-за рубежа.С точки зрения конкурентной среды, компания Saitemei занимает первое место с долей рынка 36%, за ней следует отечественное предприятие Huoxin Technology с долей рынка 22%.На долю мировых поставщиков приходится более 65% при высокой концентрации отрасли.Отечественное предприятие Saitemei Security Electronics Co., Ltd. стало ведущим предприятием в этой области.

 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!